Un article rédigé et illustré par les étudiants
Chaque trimestre, les étudiants de l’Institut publient un article qu’ils ont rédigé sur une conférence à laquelle ils ont assisté. Le texte est complété par une illustration graphique dont ils sont également les auteurs. Ces productions illustrent la capacité à travailler en équipe, la curiosité vis-à-vis des sciences et la créativité des étudiants de notre Institut. Le thème de la conférence et le travail de vulgarisation scientifique témoignent de notre souci de former des scientifiques citoyens. Cliquez sur les images pour les agrandir !
Le professeur Michel-Ange Amorim a animé à l’Institut une conférence sur les mécanismes cérébraux qui guident les sportifs. Découvrons comment le cerveau réagit aux stimuli et comment les sportifs prennent des décisions rapides.
 Le sport mobilise nos sens grâce à des stimuli afin que l’on puisse interagir avec notre environnement. Notre cerveau est très sollicité car c’est lui qui traite les messages électriques engendrés par les stimuli.
Le sport mobilise nos sens grâce à des stimuli afin que l’on puisse interagir avec notre environnement. Notre cerveau est très sollicité car c’est lui qui traite les messages électriques engendrés par les stimuli.
Comment notre cerveau s’y prend-t-il pour traiter l’information ? Deux théories se font face :
- La première compare notre cerveau à un ordinateur qui traiterait l’information via le calcul, c’est l’approche cognitive ;
- la deuxième considère plutôt notre cerveau comme une radio qui reçoit l’information et qui régule nos mouvements seulement en fonction de notre de l’environnement, c’est l’approche écologique.
Des théories un peu complexes que Michel-Ange Amorim, professeur des universités à la Faculté des sciences du sport de l’Université Paris-Saclay, et membre honoraire de l’Institut Universitaire de France, est venu nous expliquer récemment lors d’une conférence dans les locaux de l’Institut.
L’approche neurocognitive
Notre corps possède plusieurs capteurs sensoriels tels que ceux situés au bout de nos doigts pour le sens du toucher ou sur notre langue pour le goût. On les appelle des transducteurs, ils convertissent une forme d’énergie en une autre. En d’autres termes, ils prennent une force physique et la transforment en un signal électrique. Seul ce signal électrique peut être interprété par notre cerveau.
Le cerveau réagit à des stimuli provenant de l’extérieur ou de l’intérieur, qui ont la capacité de déclencher une réponse. Par exemple, il réagit si nous fermons les yeux lorsque la lumière est trop vive.
Comment le stimulus agit sur le cerveau ?
Prenons le cas d’un stimulus, par exemple, un stylo juste devant nous, c’est un stimulus « distal ». Notre cerveau quant à lui traite les conséquences de cette stimulation externe sur nos capteurs sensoriels, conséquences appelées « stimulus proximal ». Le cerveau construit ensuite une représentation mentale de l’emplacement de cet objet par rapport au corps (dans un repère égocentré).
L’approche dite “écologique”
En bougeant, nous créons des changements optiques qui nous renseignent sur le monde ainsi que sur nous-même. Néanmoins, d’après le psychologue américain James Gibson, la perception du monde n’est pas dissociable de nous-mêmes.
Selon lui, nos actions et perceptions peuvent se produire sans que nous ayons nécessairement une image mentale de l’espace. En conséquence, il identifie deux façons différentes d’expliquer la perception :
- La perception dite “directe” des informations (approche écologique), qui est disponible dans l’environnement sous forme d’invariants ;
- La perception dite “indirecte” (approche neurocognitive), où plusieurs indices spatiaux sont associés afin qu’un percept spatial puisse être construit et mis à jour au cours de notre déplacement. Un même indice peut participer à la construction de percepts différents.
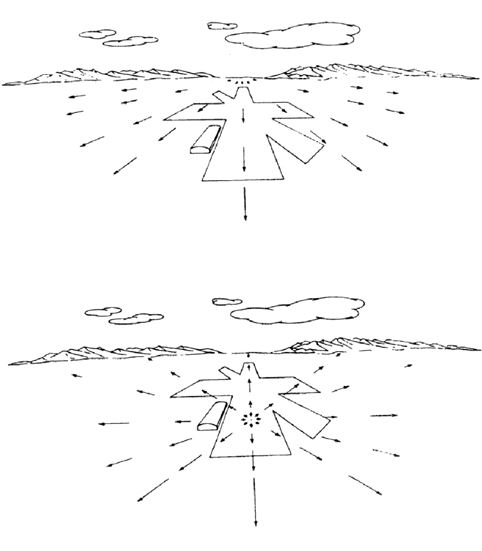
Flux optique obtenu par un pilote d’avion lorsqu’il survole la piste d’atterrissage (figure du haut) et lorsqu’il atterrit (figure du bas).
La perception “directe” se produit lorsque nous observons visuellement les configurations optiques depuis notre point de vue. Ces configurations optiques sont définies comme l’ensemble des angles formés par les contours des différentes surfaces de notre environnement tels qu’ils sont perçus depuis notre point d’observation.
La variation de ces configurations optiques à mesure que nous nous déplaçons est ce que l’on appelle le “flux optique”. D’une part, le flux optique permet une perception directe du monde extérieur, ce que l’on appelle “l’extéroception“, c’est-à-dire la perception des sensations causées par des stimuli provenant de l’extérieur. D’autre part, il nous permet également de percevoir le mouvement de notre propre corps, ce que l’on appelle “l’ex-proprioception”, c’est-à-dire la perception de notre propre déplacement sur la base des retours visuels accompagnant notre mouvement. Finalement, le mouvement nous permettrait d’être « en résonance » avec le monde.
A présent, nous pouvons nous demander comment est-il possible de spécifier la direction de nos déplacements. Cette caractéristique se produit grâce au foyer d’expansion optique (ou FEO) qui spécifie donc où nous allons.
Il suffit en effet de créer les forces nécessaires (par exemple en marchant) afin d’aligner le FEO avec le lieu que l’on souhaite atteindre. On parle donc de la recherche d’invariants (focus d’expansion) et de loi de contrôle afin de créer les forces nécessaires pour me permettre d’aligner le foyer d’expansion optique avec l’endroit où je veux aller.
Ces invariants nous permettent de réguler nos mouvements au quotidien dans nos actions. Prenons par exemple le cas des expériences de préhension de balles. On étudie la fermeture de la main afin d’attraper un objet. Pour attraper une balle qui rebondit, on voit un couplage entre la trajectoire de la balle et l’initiation du mouvement de la main.
Décider pour agir
Il est possible de modéliser la manière dont nous prenons des décisions pour agir. Les processus de prise de décision liés à la perception font intervenir notre mémoire, et nous pouvons les modéliser :
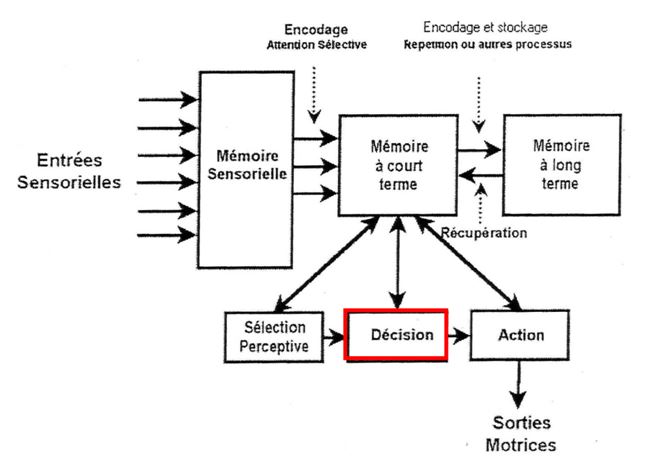
Schéma illustrant le processus décisionnel
Ensuite, des algorithmes de décision importés de l’informatique existent. Ils fonctionnent dans un mode “si-alors”. Cet apprentissage permet de créer des algorithmes efficaces et de pré-activer certains algorithmes en MCT (Mémoire à Court Terme) afin de gagner du temps. Ces algorithmes peuvent également être combinés.
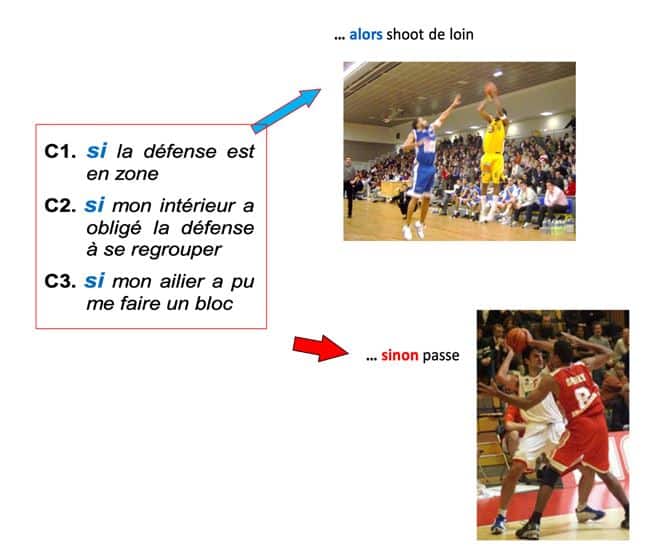
Exemple d’algorithme de décisions se reposant sur le mode “si-alors” dans le cas du basketball
La loi de Hick, ou loi de Hick-Hyman, est un modèle qui décrit le temps qu’il faut à un utilisateur pour prendre une décision en fonction du nombre de choix à sa disposition. Pour prendre une décision, l’utilisateur va catégoriser les choix sous la forme d’une arborescence, regroupant les choix similaires. Il va ensuite déterminer quelle branche de l’arborescence suivre, jusqu’à arriver à un choix unique. Cela donne un temps de réponse qui varie de façon logarithmique avec le nombre de choix. Une sélection choix par choix aurait donné un temps de réponse linéaire.
Elle est définie par la loi suivante :

Avec RT, le temps de réaction, a et b, des constantes mesurables qui dépendent de la tâche à effectuer et log2(N) qui représente la quantité d’information en bits (avec N le nombre de possibilités binaires de réponses).
Concrètement la loi de Hick implique que :
- Si l’on ajoute un élément à une liste proposant un faible nombre de choix, le temps de réponse va fortement augmenter
- A contrario, si on ajoute un choix à une liste de choix déjà longue, le temps de réponse va faiblement augmenter
- Un nombre de raccourcis trop important (par exemple : sur une page web, ou sur une télécommande) demandera un temps de recherche plus élevé que la navigation classique.
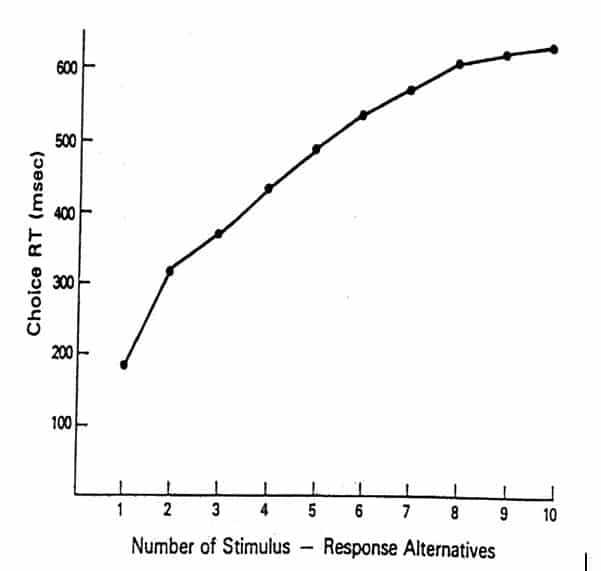
Temps de réaction en fonction du nombre de choix possibles (Merkel, 1885, cité par Woodworth, 1938)
Concrètement, dans quels domaines pouvons-nous utiliser cette loi ? Par exemple, imaginez que vous êtes joueur de tennis et que vous venez de monter au filet. Votre adversaire sur la photo réalise un coup de défense ou de contre-attaque. Vous devez identifier ce coup et répondre de façon appropriée le plus vite possible.
- Si votre adversaire effectue toujours la même réponse (par ex. un lob), il n’a pas d’information « I » nouvelle à traiter, alors on aura → I = Log2(1) = 0 bit.
- Si l’adversaire a 2 réponses possibles (lob ou passing shot), la quantité d’information à traiter vaut I = Log2(2) = 1 bit.
- S’il a 4 réponses possibles (lob ou passing shot ; croisé ou décroisé), la quantité d’information à traiter vaut I = Log2(4) = 2 bits.
- S’il a 8 réponses possibles (lob ou passing shot ; croisé ou décroisé ; lifté ou slicé), la quantité d’information à traiter sera I = Log2(8) = 3 bits.
Finalement, le sportif peut tirer un avantage de cette notion. Il peut en effet améliorer son répertoire d’actions pour augmenter le temps de réaction de son adversaire.
Au final …
Il y a deux approches théoriques pour comprendre le sport et le mouvement humain, celles-ci ne s’opposent pas nécessairement, elles peuvent même se compléter.
En effet, il existe des cas où l’une des deux théories serait plus apte à expliquer le comportement du cerveau. Par exemple, dans les situations complexes l’approche neurocognitive sera plus mise en jeu. Elle permet d’expliquer le temps de décision quand il y a beaucoup de possibilités.
Puis dans les situations plus simples, l’approche dite « écologique » suffit. Il faut juste agir en accord avec l’environnement, réguler son action sans avoir besoin de faire de calculs complexes (freiner, intercepter…).
Les deux théories s’expriment aussi selon l’expertise de la personne. Quand une personne est experte l’information sera traitée par les zones du cerveau sous-corticales (impliquées dans l’automatisation de nos comportements), comme dans l’approche « écologique » de la perception directe.
Tandis que si la personne est débutante la partie du cerveau majoritairement mise en jeu sera le cortex cérébral (impliqué dans l’effort conscient).
> Téléchargez l’affiche réalisée par les étudiants au format PDF